KI-Tischkicker: Den Gegner mit Präzision und Geschwindigkeit besiegen
Stell dir ein Tischfußballspiel vor, bei dem der menschliche Gegner durch einen Roboter ersetzt wird, der deinen nächsten Zug vorhersagt und dich besiegen kann. Dieses Projekt zielt darauf ab, einen solchen Roboter zu bauen, der mit künstlicher Intelligenz (KI) und fortschrittlichen Sensoren ausgestattet ist, um einen menschlichen Mitspieler zu besiegen. Es geht darum, einen Roboter zu bauen, die nicht nur die menschliche Fähigkeit zur Kontrolle der Kicker nachahmt, sondern auch mit sekundengenauer Präzision übertrumpfen kann.
Die Herausforderung: Der technische Entwurf des Roboters
Zu Beginn war die Herausforderung der mechanischen Konstruktion, dass der Roboter die Spieler genau wie ein Mensch bewegen und steuern kann. Die Idee ist einfach: Der Roboter muss die Stangen linear bewegen, um die Figuren horizontal zu bewegen und für Schüsse müssen sie rotiert werden. Der erste Prototyp verwendet eine Gewindespindel, die durch die hohlen Stangen lief, und eine Mutter, die mit jedem Spieler verbunden war. Dieses System ermöglicht eine präzise Bewegung, indem die Stange durch einen Motor gedreht wird.
Eine große Aufgabe bestand darin, sicherzustellen, dass sich die Spielerfiguren um ihre Achsen drehen können, um Schüsse abzugeben. Zu diesem Zweck enthält die Konstruktion einen zweiten Motor am anderen Ende der Stange, der die Stange drehen kann und so die Spielerfiguren dreht. Mit diesen Motoren kann der Roboter jede Bewegung nachahmen, die ein menschlicher Spieler ausführen würde - er kann die Spieler in Position bringen und Schüsse ausführen.
Einsatz von KI zum Tracking des Spiels
Die nächste wichtige Komponente des Projekts ist der Einsatz von KI, um den Ball und die Spieler auf dem Spielfeld in Echtzeit zu verfolgen. Eine Hochgeschwindigkeitskamera wurde dafür über dem Tisch montiert, um das Spiel zu überwachen. Die Kamera hat die Aufgabe, die Bewegung des Balls und der Spieler zu erfassen, während die KI, hier ein YOLOv8-Netzwerk, die Bilddaten verarbeitet. Dieses Netzwerk ist in der Lage, den Ball zu erkennen und zu verfolgen, auch wenn er teilweise von Spielern verdeckt ist oder sich sehr schnell bewegt.
Um die KI zu trainieren, wurden über 3.000 Bilder manuell gelabelt. Damit habe ich sichergestellt, dass das System sowohl die Spieler als auch den Ball aus einer Top-Down-Perspektive zuverlässig identifizieren kann. Nach dem Training erreichte das System eine beeindruckende Genauigkeit von 98 %. Selbst bei sich schnell bewegenden Bällen oder teilweise verdeckten Positionen verfolgte die KI immer noch alles präzise, sodass der Roboter genau reagieren kann.
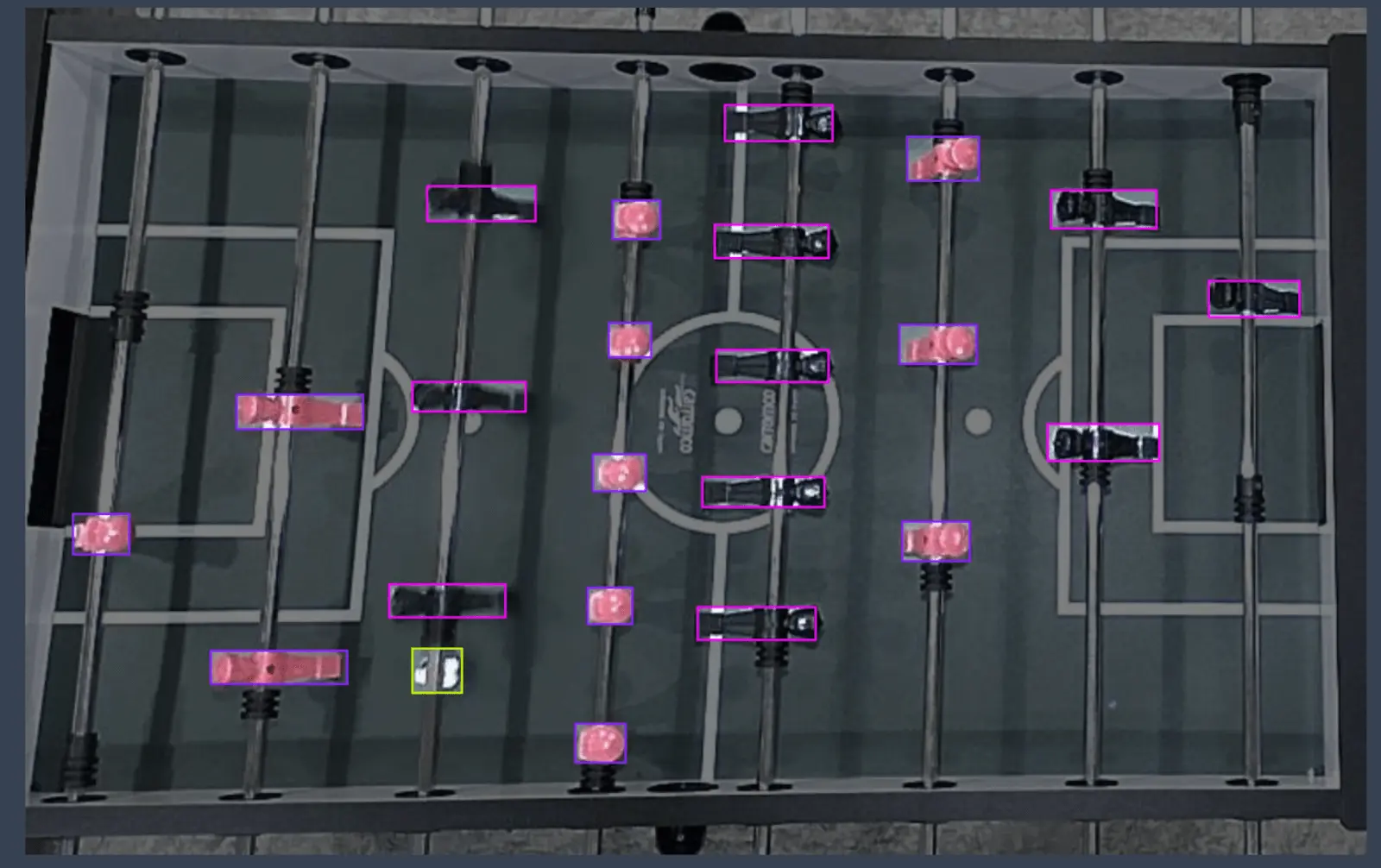
Die Spieler und der Ball werden von der KI erkannt
Hardware- und Latenzherausforderungen
Die Echtzeitverarbeitung und -steuerung sind entscheidend. Damit der Roboter schnell genug reagieren kann, um im Spiel wettbewerbsfähig zu sein, muss das System mit minimaler Latenzzeit arbeiten. Mit der aktuellen Hardware kann die KI Bilder mit etwa 200 Bildern pro Sekunde verarbeiten. Dies ist mehr als ausreichend, um sicherzustellen, dass der Roboter in Echtzeit reagieren kann.
Darüber hinaus war das Kamerasetup eine Herausforderung, da sichergestellt werden muss, dass sie eine klare Sicht auf das gesamte Spielfeld hat. Die Platzierung und Befestigung der Kamera habe ich so konzipiert, dass Vibrationen minimiert werden, die das Spielfeld falsch ausrichten und die Leistung des Roboters beeinträchtigen könnten. Dafür sind an den Ecken des Tisches Markierungen angebracht, die dem System helfen, die genaue Position des Spielfelds zu bestimmen und eventuelle Fehlausrichtungen zu korrigieren.
Aufbau des Steuerungssystems
Die Bewegung der Figuren erfordert eine präzise Koordination zwischen Motoren, Encodern und Servos. Jede Stange wird von einem Motor gesteuert, der den Spieler nach links und rechts bewegt. Die Encoder verfolgen die Position des Spielers, während die Servomotoren die Rotationsbewegung zur Ausführung der Schüsse ermöglichen. Die Stromversorgung des Roboters erfolgt über eine speziell entwickelte Platine, auf der die gesamte Elektronik untergebracht ist. Sie ermöglicht es dem System, die Position jedes Spielers auf den Stangen zu verfolgen und die Motoren entsprechend einzustellen.

Aktueller Prototyp einer Steuerungsplatine
Ausblick
Jetzt geht es darum, die Fähigkeit des Roboters zu verfeinern, sich schnell und präzise zu bewegen, insbesondere während der Drehungen beim Schießen. Ein wesentlicher Teil der laufenden Arbeit besteht in der Optimierung der Software zur Verwaltung der Hochfrequenzberechnungen, die zur Aufrechterhaltung von 200-Hz-Aktualisierungen erforderlich sind, um sicherzustellen, dass der Roboter seinem menschlichen Gegner immer einen Schritt voraus ist.
Im weiteren Verlauf des Projekts sind die nächsten Schritte die Fertigstellung der Steuerungssoftware, die weitere Feinabstimmung der KI und die Integration aller Komponenten. So ist das Ziel, einen Roboter zu entwickeln, der nicht nur Tischfußball spielt, sondern dies auch auf eine Weise tut, die menschliche Spieler herausfordert und schließlich besiegt.
Mehr Updates auf dem Tischfußball-Blog:
Tischfußball-Blog